ອີເມວ: anwenqq2690502116@gmail.com
ການອອກແບບສະຖານີຍ່ອຍປະເພດກ່ອງອັດສະລິຍະ 10kV ໂດຍອີງໃສ່ເວທີ Gizwits IoT + STM32
ລະບົບຄວບຄຸມໄລຍະໄກຂອງສະຖານີຍ່ອຍແບບອັດສະລິຍະ 10kV ທີ່ແນະນຳໃນບົດຄວາມນີ້ຖືກອອກແບບ ແລະພັດທະນາໂດຍ Tian Hui ຈາກມະຫາວິທະຍາໄລວິທະຍາສາດ ແລະເຕັກໂນໂລຊີ Xi'an..
ລະບົບດັ່ງກ່າວໃຊ້ເວລາການອອກແບບຂອງລະບົບການປ່ຽນແປງກ່ອງອັດສະລິຍະ 10kV ສໍາລັບອາພາດເມັນນັກສຶກສາໃນວິທະຍາໄລເປັນພື້ນຖານວິສະວະກໍາ., ແລະອອກແບບລະບົບການປ່ຽນແປງກ່ອງອັດສະລິຍະ 10kV ໂດຍອີງໃສ່ ອິນເຕີເນັດຂອງສິ່ງຕ່າງໆ. ລະບົບປະກອບດ້ວຍສາມສ່ວນ: ຊັ້ນການຮັບຮູ້, ຊັ້ນການສື່ສານແລະຊັ້ນຄໍາຮ້ອງສະຫມັກ. ຊັ້ນການຮັບຮູ້ແມ່ນຮັບຜິດຊອບສໍາລັບການເກັບຂໍ້ມູນເຊັນເຊີແລະການສົ່ງຕໍ່ໄປຫາຜູ້ຄວບຄຸມພາກສະຫນາມ.
ລວມທັງອຸປະກອນລະບົບຮອງເຊັ່ນອຸປະກອນປ້ອງກັນໄມໂຄຄອມພິວເຕີ, ແມັດເຄືອຂ່າຍອັດສະລິຍະ, ແລະຕົວຄວບຄຸມການຊົດເຊີຍພະລັງງານທີ່ສະຫຼາດ, ເຊັ່ນດຽວກັນກັບອຸປະກອນກວດຫາສິ່ງແວດລ້ອມເຊັ່ນ: ອຸນຫະພູມແລະຄວາມຊຸ່ມຊື່ນ, ຄວັນຢາສູບ, ແລະເຊັນເຊີ immersion ນ້ໍາ. ຕົວຄວບຄຸມຢູ່ໃນສະຖານທີ່ໃຊ້ microprocessor ຝັງຕົວ STM32, ລວມທັງຈໍ LCD, ໂມດູນປຸກສຽງ, Relay ແລະໂມດູນການສື່ສານ GPRS, ແລະອື່ນໆ; ຊັ້ນການສື່ສານໃຊ້ການສື່ສານໄຮ້ສາຍ GPRS, ເຊິ່ງຮັບຜິດຊອບຕໍ່ການສົ່ງຂໍ້ມູນສອງທາງລະຫວ່າງຕົວຄວບຄຸມໃນເວັບໄຊ ແລະແພລະຕະຟອມຄລາວ; ແພລດຟອມຄລາວຂອງ Gizwits ພັດທະນາລະບົບການຕິດຕາມໄລຍະໄກ ແລະແອັບຯມືຖືສໍາລັບເຄື່ອງຫັນປ່ຽນປະເພດກ່ອງ, ເຊິ່ງຮັບຜິດຊອບສໍາລັບການເກັບຮັກສາ, ການວິເຄາະແລະການປຸງແຕ່ງຂໍ້ມູນການດໍາເນີນງານຂອງຫມໍ້ໄຟປະເພດກ່ອງ.
This system finally realizes the user's remote monitoring of environmental parameters such as variable temperature and humidity, ສັນຍານເຕືອນຄວັນໄຟແລະນ້ໍາຂຸມພື້ນຖານ, ເຊັ່ນດຽວກັນກັບຕົວກໍານົດການໄຟຟ້າເຊັ່ນ: ປະຈຸບັນ, ແຮງດັນ, ປັດໄຈຄວາມຖີ່ ແລະພະລັງງານ, ແລະສະຖານະພາບການເຮັດວຽກອຸປະກອນໂດຍຜ່ານ WEB ຄອມພິວເຕີຫຼື APP ໂທລະສັບມືຖື.
ເມື່ອມີຄວາມຜິດປົກກະຕິຫຼືຄວາມຜິດໃນການດໍາເນີນງານຂອງຫມໍ້ແປງປະເພດກ່ອງ, ລະບົບຕິດຕາມກວດກາອັດຕະໂນມັດຕັດສິນລະດັບຄວາມຜິດ, ແລະສົ່ງສັນຍານເຕືອນໂດຍຜ່ານການປະສົມທີ່ແຕກຕ່າງກັນຂອງລະຄັງຢູ່ໃນເວັບໄຊ, APP ໂທລະສັບມືຖື, SMS ແລະໂທລະສັບ, ແລະອື່ນໆ, ພ້ອມທັງແຈ້ງໃຫ້ພະນັກງານທີ່ກ່ຽວຂ້ອງແກ້ໄຂບັນຫາທີ່ເຊື່ອງຊ້ອນໃຫ້ທັນການ ແລະ ປ້ອງກັນອຸປະຕິເຫດທາງໄຟຟ້າ. . ມັນເຫມາະສົມສໍາລັບການຕິດຕາມຫ່າງໄກສອກຫຼີກແລະການຄຸ້ມຄອງສູນກາງຂອງຫມໍ້ແປງກ່ອງແລະຫ້ອງກະຈາຍພະລັງງານ, ແລະສາມາດປັບປຸງຢ່າງຫຼວງຫຼາຍລະດັບຄວາມປອດໄພຂອງການສະຫນອງພະລັງງານແລະຄວາມຫນ້າເຊື່ອຖືຂອງອຸປະກອນການແຜ່ກະຈາຍພະລັງງານໃນໂຮງຮຽນ, ວິສາຫະກິດແລະຊຸມຊົນ.
1. ແນະນຳ
ດ້ວຍການກໍ່ສ້າງ ແລະ ພັດທະນາເສດຖະກິດສັງຄົມ ແລະ ເຄືອຂ່າຍການແຜ່ກະຈາຍ, ມີການຫັນປ່ຽນກ່ອງ 10kV ຫຼາຍຂຶ້ນ. ສະຖານີຍ່ອຍປະເພດກ່ອງ 10kV ແບບດັ້ງເດີມໂດຍທົ່ວໄປໃຊ້ຮູບແບບການດໍາເນີນງານຂອງການກວດກາແບບປົກກະຕິໂດຍບໍ່ໄດ້ເອົາໃຈໃສ່ແລະຄູ່ມື., ເຊິ່ງມີລະດັບສະຕິປັນຍາຕໍ່າ ແລະຂາດການຕິດຕາມຫ່າງໄກສອກຫຼີກ ແລະລະບົບແຈ້ງເຕືອນຄວາມຜິດຕໍ່ສິ່ງແວດລ້ອມ ແລະອຸປະກອນ. ປັດຈຸບັນ, ກັບການພັດທະນາຢ່າງໄວວາຂອງເຕັກໂນໂລຊີ sensor smart, ເຕັກໂນໂລຊີຝັງ, ເຕັກໂນໂລຊີການສື່ສານແລະເຕັກໂນໂລຊີຄອມພິວເຕີຟັງແລະການຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍ, ສະຖານີຍ່ອຍປະເພດກ່ອງອັດສະລິຍະ 10kV ໂດຍອີງໃສ່ອິນເຕີເນັດຂອງສິ່ງຕ່າງໆໄດ້ກາຍເປັນທາງເລືອກທີ່ດີທີ່ສຸດສໍາລັບການຍົກລະດັບແລະການຫັນປ່ຽນສະຖານີຍ່ອຍປະເພດກ່ອງແບບດັ້ງເດີມ..
ລະບົບຕິດຕາມໄລຍະໄກຂອງສະຖານີຍ່ອຍປະເພດກ່ອງອັດສະລິຍະໂດຍອີງໃສ່ອິນເຕີເນັດຂອງສິ່ງຕ່າງໆສາມາດຕິດຕາມສະພາບແວດລ້ອມຂອງສະຖານີຍ່ອຍປະເພດກ່ອງອັດສະລິຍະໄດ້ຈາກໄລຍະໄກ., ຕົວກໍານົດການປະຕິບັດງານແລະສະຖານະຂອງອຸປະກອນໃນເວລາທີ່ແທ້ຈິງ. ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 1.
ຜູ້ໃຊ້ຫ່າງໄກສອກຫຼີກສາມາດຕິດຕາມຕົວກໍານົດການສິ່ງແວດລ້ອມເຊັ່ນ: ອຸນຫະພູມແລະຄວາມຊຸ່ມຊື່ນຂອງປ່ອງ, ປຸກຄວັນຢາສູບ, ແລະການສະສົມນ້ໍາໃນຂຸມພື້ນຖານ, ເຊັ່ນດຽວກັນກັບຕົວກໍານົດການໄຟຟ້າເຊັ່ນ: ປະຈຸບັນ, ແຮງດັນ, ຄວາມຖີ່, ແລະປັດໄຈພະລັງງານ, ແລະສະຖານະອຸປະກອນຜ່ານຄອມພິວເຕີ ຫຼືແອັບມືຖືໄດ້ທຸກເວລາ. ໃນເວລາທີ່ສະຖານີຍ່ອຍກ່ອງເຮັດວຽກຜິດປົກກະຕິຫຼືລົ້ມເຫລວ, ລະບົບຕິດຕາມກວດກາອັດຕະໂນມັດຈະແຈ້ງໃຫ້ພະນັກງານທີ່ກ່ຽວຂ້ອງໂດຍຜ່ານວິທີການທີ່ແຕກຕ່າງກັນຂອງ APP ໂທລະສັບມືຖື, SMS ແລະໂທລະສັບຕາມລະດັບຄວາມຜິດ, ເພື່ອລົບລ້າງຄວາມຜິດທີ່ເຊື່ອງໄວ້ໃຫ້ທັນເວລາ ແລະ ປ້ອງກັນອຸບັດເຫດທາງໄຟຟ້າ.

10ສະຖານີຍ່ອຍປະເພດກ່ອງອັດສະລິຍະ kV ໂດຍອີງໃສ່ອິນເຕີເນັດຂອງສິ່ງຕ່າງໆ
ລະບົບການຕິດຕາມໄລຍະໄກຂອງສະຖານີຍ່ອຍປະເພດກ່ອງອັດສະລິຍະປະກອບດ້ວຍ ກ "fieldbus LAN" ພາຍໃນສະຖານີຍ່ອຍປະເພດກ່ອງ ແລະ ກ "cloud platform ເຄືອຂ່າຍພື້ນທີ່ກ້ວາງ" ນອກສະຖານີຍ່ອຍປະເພດກ່ອງ. ຮູບແບບໂຄງສ້າງນີ້ສາມາດຖືກນໍາໃຊ້ກັບການພັດທະນາລະບົບຕິດຕາມກວດກາຫ່າງໄກສອກຫຼີກສໍາລັບອຸປະກອນການສະຫນອງນ້ໍາຮອງລະບົບຕິດຕາມກວດກາຫ່າງໄກສອກຫຼີກ, ລະບົບການຄຸ້ມຄອງຄ່າໄຟຟ້າທີ່ຢູ່ອາໄສ, ແລະລະບົບຕິດຕາມໄລຍະໄກຂອງລິຟເພື່ອປັບປຸງສະຕິປັນຍາແລະລະດັບການຄຸ້ມຄອງຂອງອຸປະກອນພື້ນເມືອງແລະສົ່ງເສີມການຍົກລະດັບອຸດສາຫະກໍາພື້ນເມືອງ.. ມັນມີມູນຄ່າຄໍາຮ້ອງສະຫມັກທີ່ດີ.
2. ການອອກແບບໂຄງການໂດຍລວມ
ການອອກແບບສະຖານີຍ່ອຍປະເພດກ່ອງອັດສະລິຍະໂດຍອີງໃສ່ Internet of Things ແມ່ນອີງໃສ່ການອອກແບບຂອງສະຖານີຍ່ອຍປະເພດກ່ອງອັດສະລິຍະ 10kV ໃນອາພາດເມັນຂອງນັກສຶກສາວິທະຍາໄລ.. ການອອກແບບລະບົບຫຼັກຂອງໝໍ້ແປງປະເພດກ່ອງອັດສະລິຍະ 10kV ແມ່ນຄືກັນກັບເຄື່ອງຫັນປ່ຽນປະເພດກ່ອງ 10kV ແບບດັ້ງເດີມ., ແລະມັນມັກຈະເປັນຜູ້ໃຫຍ່. ບົດຄວາມນີ້ໄດ້ສຸມໃສ່ການອອກແບບອັດສະລິຍະຂອງ 10kV smart box-type transformer. ຕໍ່ໄປນີ້ແມ່ນສະພາບລວມໂດຍຫຍໍ້ຂອງເນື້ອໃນການອອກແບບຂອງລະບົບຕົ້ນຕໍຂອງ 10kV smart box-type transformer.
2.1 ການອອກແບບລະບົບປະຖົມຂອງສະຖານີຍ່ອຍປະເພດກ່ອງອັດສະລິຍະ 10kV
ການໂຫຼດພະລັງງານຂອງ No. 5 ອາຄານອາພາດເມັນຂອງນັກສຶກສາຢູ່ໃນມະຫາວິທະຍາໄລສ່ວນໃຫຍ່ແມ່ນເຮັດໃຫ້ມີແສງ, ຄອມພິວເຕີແລະການໂຫຼດເຄື່ອງປັບອາກາດເພີ່ມໃຫມ່. ແຕ່ລະຫໍພັກແມ່ນຄິດໄລ່ເປັນ 8 ຄົນ, ການໂຫຼດແສງສະຫວ່າງແມ່ນ 100W, ການໂຫຼດຄອມພິວເຕີນັກຮຽນແຕ່ລະຄົນແມ່ນ 200W, ແລະ hanger ແຍກ 1.5P ແຕ່ລະປະເພດໄດ້ຖືກຕິດຕັ້ງໃຫມ່ກັບເຄື່ອງປັບອາກາດ, ພະລັງງານແມ່ນ 1.3kW., ແລະການໂຫຼດຂອງຫໍພັກດຽວແມ່ນ 3.0kW. ອີງຕາມການ "ຄູ່ມືການອອກແບບການສະຫນອງແລະການແຜ່ກະຈາຍອຸດສາຫະກໍາແລະພົນລະເຮືອນ", the dormitory's power load demand coefficient is 0.7, ແລະປັດໄຈພະລັງງານແມ່ນ 0.8.
ພິຈາລະນາການເພີ່ມຂຶ້ນຂອງການໂຫຼດໄຟຟ້າຂອງອາພາດເມັນຂອງນັກຮຽນໃນອະນາຄົດ, ຫມໍ້ແປງຕ້ອງການສະຫງວນຂອບໃບທີ່ແນ່ນອນ, ແລະຫມໍ້ແປງທີ່ມີຄວາມຈຸຂອງ 1000kVA ຖືກເລືອກ. ພິຈາລະນາຄ່າໃຊ້ຈ່າຍໃນການລົງທຶນເບື້ອງຕົ້ນແລະຄ່າໃຊ້ຈ່າຍໃນການດໍາເນີນງານຂອງຫມໍ້ແປງ, ເຊັ່ນດຽວກັນກັບຂໍ້ກໍານົດຂອງນະໂຍບາຍການອະນຸລັກພະລັງງານແຫ່ງຊາດແລະການຫຼຸດຜ່ອນການປ່ອຍອາຍພິດ, ໝໍ້ແປງນ້ຳມັນທີ່ຜະນຶກເຂົ້າກັນເຕັມທີ່ສູນເສຍຕໍ່າ S13-M-1000/10-0.4 ຖືກເລືອກເພື່ອຈຸດປະສົງນີ້..
ບົນພື້ນຖານການຄິດໄລ່ສະຖິຕິການໂຫຼດ, ການຄິດໄລ່ໄລຍະສັ້ນ, ການກວດສອບຄວາມຫມັ້ນຄົງແບບເຄື່ອນໄຫວແລະການກວດສອບຄວາມຫມັ້ນຄົງຂອງຄວາມຮ້ອນ, ອຸປະກອນຕົ້ນຕໍຂອງລະບົບປະຖົມຂອງຫມໍ້ແປງປະເພດກ່ອງແມ່ນເລືອກ. ຮູບແບບສະເພາະແລະຕົວກໍານົດການດ້ານວິຊາການຂອງອຸປະກອນຕົ້ນຕໍຂອງລະບົບປະຖົມແມ່ນສະແດງຢູ່ໃນຕາຕະລາງ 3, ຕາຕະລາງ 4, ຕາຕະລາງ 5 ແລະຕາຕະລາງ 6.
ອີງຕາມຂໍ້ກໍານົດການອອກແບບຂອງ No. 5 ນັກຮຽນຫ້ອງແຖວໂຄງການ substation ກ່ອງແລະການຄິດໄລ່ການອອກແບບລະບົບປະຖົມ, ແຜນວາດສາຍໄຟຕົ້ນຕໍຂອງລະບົບປະຖົມການອອກແບບຂອງ No. 5 ສະຖານີຍ່ອຍຫ້ອງແຖວຂອງນັກຮຽນແມ່ນສະແດງຢູ່ໃນຮູບ 2.

ຮູບ 2 : ແຜນຜັງສາຍໄຟຕົ້ນຕໍຂອງລະບົບປະຖົມຂອງສະຖານີຍ່ອຍປະເພດກ່ອງໃນອາພາດເມັນນັກສຶກສາໃນມະຫາວິທະຍາໄລ
2.2 ໂຄງການອອກແບບອັດສະລິຍະຂອງຫມໍ້ແປງກ່ອງ 10kV
ມຸ່ງໄປເຖິງຂໍ້ບົກພ່ອງຂອງການອອກແບບ ແລະບັນຫາຕ່າງໆທີ່ມີຢູ່ໃນການຄຸ້ມຄອງການດໍາເນີນງານຂອງສະຖານີຍ່ອຍປະເພດກ່ອງແບບດັ້ງເດີມ 10kV, ກຸນແຈເພື່ອແກ້ໄຂບັນຫາແມ່ນຢູ່ໃນການກໍ່ສ້າງລະບົບວົງປິດສໍາລັບການຊອກຄົ້ນຫາ, ການຕິດຕາມຫ່າງໄກສອກຫຼີກແລະການປຸກຂອງສະພາບແວດລ້ອມ substation ປ່ອງອັດສະລິຍະແລະອຸປະກອນ, ແລະການອອກແບບມີການຕິດຕາມຫ່າງໄກສອກຫຼີກຂອງສະພາບແວດລ້ອມການດໍາເນີນງານແລະອຸປະກອນໄຟຟ້າ ລະບົບຫມໍ້ແປງກ່ອງອັດສະລິຍະທີ່ມີຫນ້າທີ່ຕ່າງໆສາມາດເກັບກໍາແລະຕິດຕາມຕົວກໍານົດການດ້ານສິ່ງແວດລ້ອມເຊັ່ນ: ການຄວບຄຸມການເຂົ້າເຖິງຂອງຫມໍ້ແປງກ່ອງ., ອຸນຫະພູມແລະຄວາມຊຸ່ມຊື່ນ, ປຸກຄວັນຢາສູບ, ແລະນ້ໍາໃນ trench ສາຍໄຟ, ເຊັ່ນດຽວກັນກັບແຮງດັນ, ປະຈຸບັນ, ພະລັງງານການເຄື່ອນໄຫວ, ພະລັງງານ reactive, ປັດໄຈພະລັງງານ, ອຸນຫະພູມສາຍ, ໝໍ້ແປງໄຟ, ແລະອື່ນໆ.
ອຸນຫະພູມຮ່າງກາຍແລະສັນຍານເຕືອນອາຍແກັສແລະຕົວກໍານົດການປະຕິບັດງານອຸປະກອນອື່ນໆ, ພັດລົມລະບາຍອາກາດຄວບຄຸມໄລຍະໄກ, ອຸປະກອນປ້ອງກັນໄມໂຄຄອມພິວເຕີແລະສະຫຼັບ breaker circuit.
ລະບົບດັ່ງກ່າວໄດ້ຮັບຮອງເອົາເຄື່ອງມືອັດສະລິຍະ ແລະເຊັນເຊີອັດສະລິຍະທີ່ມີໜ້າທີ່ສື່ສານທີ່ໃຊ້ທົ່ວໄປໃນສະຖານທີ່ອຸດສາຫະກຳ, ແລະສົ່ງຂໍ້ມູນທີ່ເກັບກໍາກັບຜູ້ຄວບຄຸມພາກສະຫນາມໂດຍຜ່ານການສື່ສານລົດເມພາກສະຫນາມ, ແລະຕົວຄວບຄຸມພາກສະຫນາມຈະສົ່ງຂໍ້ມູນໄປຍັງເຄື່ອງແມ່ຂ່າຍຫຼືຄອມພິວເຕີໂຮດຄລາວໂດຍຜ່ານໂມດູນການສື່ສານແບບໄຮ້ສາຍຫຼືມີສາຍ. ປະຕິບັດຫນ້າທີ່ເຊັ່ນ: telemetry, ສັນຍານຫ່າງໄກສອກຫຼີກແລະການຄວບຄຸມໄລຍະໄກ.
ລະບົບຕິດຕາມກວດກາຫ່າງໄກສອກຫຼີກຂອງຫມໍ້ແປງກ່ອງອັດສະລິຍະ 10kV ໂດຍອີງໃສ່ Internet of Things ໃຊ້ເຄື່ອງມືອັດສະລິຍະແລະເຊັນເຊີທີ່ມີຟັງຊັນການສື່ສານສອງທາງດິຈິຕອນ, ແລະເປັນເອກະພາບຮັບຮອງເອົາມາດຕະຖານການໂຕ້ຕອບລົດເມ RS485 ແລະໂປໂຕຄອນການສື່ສານ Modbus-RTU. ລະບົບຕິດຕາມກວດກາຫ່າງໄກສອກຫຼີກຂອງຫມໍ້ແປງກ່ອງອັດສະລິຍະໂດຍອີງໃສ່ອິນເຕີເນັດຂອງສິ່ງຕ່າງໆແມ່ນປະກອບດ້ວຍສາມສ່ວນ: ຊັ້ນການຮັບຮູ້, ຊັ້ນການສື່ສານແລະຊັ້ນຄໍາຮ້ອງສະຫມັກ.
* ຊັ້ນການຮັບຮູ້: ຜ່ານເຄື່ອງວັດແທກອັດສະລິຍະຕ່າງໆ ແລະເຊັນເຊີອັດສະລິຍະເພື່ອເກັບກຳສະພາບແວດລ້ອມຕ່າງໆ, ຕົວກໍານົດການການດໍາເນີນງານຂອງອຸປະກອນແລະສະຖານະການເຮັດວຽກຂອງອຸປະກອນການຫັນປ່ຽນກ່ອງ, ແລະສົ່ງຂໍ້ມູນໄປຍັງຜູ້ຄວບຄຸມພາກສະຫນາມໂດຍຜ່ານລົດເມ RS485. ຕົວຄວບຄຸມພາກສະຫນາມມີລະບົບປະຕິບັດການທີ່ຕິດຕັ້ງໄວ້ແລະມີການເກັບກໍາຂໍ້ມູນ, ຄອມພິວເຕີ, ຫນ້າທີ່ການປຸງແຕ່ງແລະການຄວບຄຸມ.
* ຊັ້ນການສື່ສານ: ຊັ້ນນີ້ແມ່ນການເຊື່ອມຕໍ່ແລະການເຊື່ອມຕໍ່ຂອງການສົ່ງຂໍ້ມູນແລະການແລກປ່ຽນ, ແລະຮັບຜິດຊອບສໍາລັບການສົ່ງຂໍ້ມູນສອງທາງລະຫວ່າງແພລະຕະຟອມຟັງແລະຕົວຄວບຄຸມຢູ່ໃນສະຖານທີ່. ອີງຕາມເງື່ອນໄຂການສື່ສານຕົວຈິງຂອງຫມໍ້ແປງປະເພດກ່ອງ, ວິທີການສື່ສານຕ່າງໆເຊັ່ນ: ສາຍເຄເບີນ optical, Ethernet ຫຼື GPRS ໄຮ້ສາຍສາມາດຖືກເລືອກເພື່ອສົ່ງຂໍ້ມູນໄປຍັງແພລະຕະຟອມຄລາວ.
*ຊັ້ນຄໍາຮ້ອງສະຫມັກ: ອອກແບບ ແລະ ພັດທະນາລະບົບຕິດຕາມໄລຍະໄກສຳລັບໝໍ້ແປງປະເພດກ່ອງໃນເວທີຄລາວ, ຮັບຜິດຊອບສໍາລັບການສົ່ງ, ການຮັບແລະປະຕິບັດຂໍ້ມູນປະຫວັດສາດ, ການຕິດຕາມໄລຍະໄກຂອງຕົວກໍານົດການການດໍາເນີນງານຂອງຫມໍ້ແປງປະເພດກ່ອງ, ແລະບັນທຶກການເກັບຮັກສາແລະການວິເຄາະຂໍ້ມູນການດໍາເນີນງານເຫດການ. ແລະພັດທະນາເວັບໄຊຕ໌ແລະ APP ໂທລະສັບມືຖືໃນເວທີຟັງໄດ້, ຊ່າງໄຟຟ້າທີ່ຢູ່ໃນຫນ້າທີ່ສາມາດຕິດຕາມກວດກາຂໍ້ມູນການດໍາເນີນງານແລະອຸປະກອນສະຖານະການເຮັດວຽກຂອງຫມໍ້ໄຟປ່ອງໄດ້ທຸກເວລາໂດຍຜ່ານຄອມພິວເຕີຫຼື APP ມືຖື.
3. ການອອກແບບຮາດແວລະບົບ
3.1 ລົດເມ RS485 ເຄືອຂ່າຍທ້ອງຖິ່ນຂອງສະຖານທີ່ການຫັນເປັນກ່ອງ
ດ້ວຍການພັດທະນາແລະຄວາມກ້າວຫນ້າຂອງເຕັກໂນໂລຢີຝັງຕົວແລະການຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍ, ເຄື່ອງມືກວດສອບຈໍານວນຫຼາຍ, ເຊັນເຊີແລະຕົວກະຕຸ້ນມີຕົວປະມວນຜົນ microprocessor ສໍາລັບຂໍ້ບົກຜ່ອງແລະບັນຫາຂອງການສົ່ງຂໍ້ມູນຂອງອຸປະກອນພາກສະຫນາມປະເພດກ່ອງແບບດັ້ງເດີມ, ເຊິ່ງສາມາດເຮັດສໍາເລັດການແປງ ADDA ແລະ linearization ແລະການກັ່ນຕອງດິຈິຕອນ. ການໂຕ້ຕອບຂໍ້ມູນການສື່ສານ serial ໄດ້ຖືກເພີ່ມພາຍໃນອຸປະກອນພາກສະຫນາມດິຈິຕອນເຫຼົ່ານີ້, ແລະການສື່ສານສອງທາງ serial ລະຫວ່າງອຸປະກອນພາກສະຫນາມສາມາດຮັບຮູ້ໄດ້ໂດຍການໃຊ້ໂປໂຕຄອນການສື່ສານມາດຕະຖານທີ່ເປັນເອກະພາບ.
ເຄືອຂ່າຍລົດເມອຸດສາຫະ ກຳ ສ່ວນໃຫຍ່ແມ່ນໃຊ້ໃນປະຈຸບັນ.
ກຸນແຈອັນໜຶ່ງໃນການອອກແບບລະບົບຕິດຕາມໄລຍະໄກສຳລັບເຄື່ອງຫັນປ່ຽນປະເພດກ່ອງອັດສະລິຍະແມ່ນການເລືອກເຄື່ອງມືອັດສະລິຍະ ແລະເຊັນເຊີທີ່ມີຟັງຊັນການສື່ສານແບບດິຈິຕອນສອງທາງ., ແລະຮັບຮອງເອົາມາດຕະຖານ ແລະ ເອກະພາບໃນການໂຕ້ຕອບລົດເມ ແລະອະນຸສັນຍາການສື່ສານ. ເລີ່ມຕົ້ນຈາກການປະຕິບັດວິສະວະກໍາຂອງການອອກແບບການຫັນເປັນປະເພດກ່ອງອັດສະລິຍະ 10kV ໃນສະບັບເລກທີ. 5 ຫ້ອງແຖວນັກຮຽນ, ລົດເມ RS485 ແລະໂປໂຕຄອນການສື່ສານ Modbus-RTU ໂດຍທົ່ວໄປສະຫນັບສະຫນູນໂດຍເຊັນເຊີອັດສະລິຍະໄດ້ຖືກເລືອກ..
ອີງຕາມແຜນຜັງສາຍໄຟຕົ້ນຕໍຂອງລະບົບປະຖົມຂອງຫມໍ້ແປງກ່ອງໃນອາພາດເມັນຂອງນັກຮຽນໃນວິທະຍາໄລແລະແຜນວາດລະບົບຕັນຂອງລະບົບຕິດຕາມໄລຍະໄກກ່ອງ - ໝໍ້ແປງອັດສະລິຍະ 10kV., ການອອກແບບຮາດແວຂອງລະບົບເອົາຕົວຄວບຄຸມພາກສະຫນາມຂອງກ່ອງຫັນເປັນຫຼັກ, ແລະປະກອບດ້ວຍອຸປະກອນປ້ອງກັນແບບປະສົມປະສານຂອງໄມໂຄຄອມພິວເຕີ, ເຄື່ອງວັດແທກເຄືອຂ່າຍອັດສະລິຍະ ແລະພະລັງງານປະຕິກິລິຍາອັດສະລິຍະ ອຸປະກອນລະບົບຮອງເຊັ່ນເຄື່ອງຊົດເຊີຍ, ແລະເຊັນເຊີກວດຈັບສິ່ງແວດລ້ອມເຊັ່ນ ເຊັນເຊີຄວັນໄຟອຸນຫະພູມແລະຄວາມຊຸ່ມຊື່ນ, ເຊັນເຊີອຸນຫະພູມ PT100 ແລະເຊັນເຊີການລ່ວງລະເມີດນ້ໍາປະກອບເປັນເຄືອຂ່າຍທ້ອງຖິ່ນຂອງລົດເມ RS485 ຂອງເວັບໄຊທ໌ການຫັນປ່ຽນກ່ອງໃສ່ກ່ອງ.. ແຜນວາດລະບົບເຄືອຂ່າຍທ້ອງຖິ່ນຂອງລົດເມ RS485 ຂອງໝໍ້ແປງກ່ອງແມ່ນສະແດງຢູ່ໃນຮູບ 4.
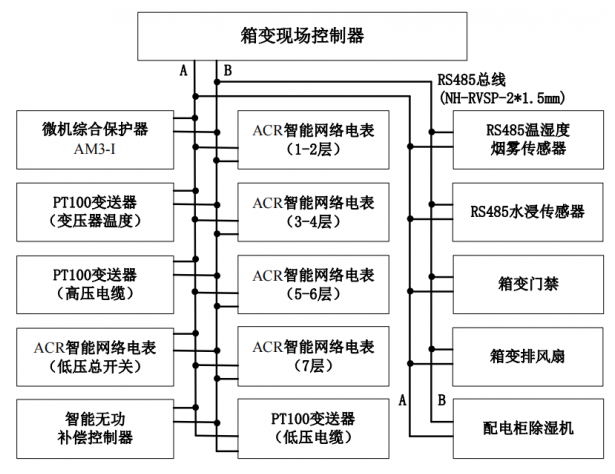
ແຜນວາດລະບົບເຄືອຂ່າຍທ້ອງຖິ່ນລົດເມ RS485 ຂອງສະຖານທີ່ການຫັນປ່ຽນປະເພດກ່ອງ
(1) ລົດເມການສື່ສານ RS485 serial
ຮູບແບບການສື່ສານຂອງລົດເມ RS485 ແມ່ນຮູບແບບການເປັນທາດ, ແລະອຸປະກອນແມ່ບົດສໍາຫຼວດແຕ່ລະອຸປະກອນສໍາລອງສໍາລັບການສື່ສານ, ແລະເຄືອຂ່າຍຫນຶ່ງຫາຫຼາຍຈຸດສາມາດສ້າງຕັ້ງຂຶ້ນເພື່ອສ້າງລະບົບການແຈກຢາຍ. ອິນເຕີເຟດ RS485 ເປັນອິນເຕີເຟດ serial ຄວາມໄວຕໍ່າທີ່ໃຊ້ກັນຢ່າງກວ້າງຂວາງ, ແລະການໂຕ້ຕອບ RS485 ມີລັກສະນະດັ່ງຕໍ່ໄປນີ້.
* ອິນເຕີເຟດ RS485.
RS485 ການໂຕ້ຕອບການສື່ສານຮັບຮອງເອົາຮູບແບບການສົ່ງທີ່ແຕກຕ່າງກັນ, ແລະມີການປະສົມປະສານຂອງຄົນຂັບທີ່ສົມດູນແລະຕົວຮັບທີ່ແຕກຕ່າງກັນ, ແລະໃຊ້ຄວາມແຕກຕ່າງກັນແຮງດັນຢູ່ທັງສອງສົ້ນຂອງສາຍເຄເບີ້ນເພື່ອສົ່ງສັນຍານ, ເຊິ່ງຊ່ວຍເພີ່ມຄວາມສາມາດໃນການຕ້ານການລົບກວນແບບທົ່ວໄປ ແລະ ຕ້ານການລົບກວນສຽງລົບກວນໄດ້ຢ່າງຫຼວງຫຼາຍ.
* ລົດເມ RS485 ມີອັດຕາການສົ່ງໄຟຟ້າສູງແລະໄລຍະການສົ່ງຕໍ່ຍາວ. ໄລຍະການສົ່ງສູງສຸດແມ່ນປະມານ 1200 ແມັດ, ແລະອັດຕາການສົ່ງສັນຍານສູງສຸດແມ່ນ 10Mbps; ອັດຕາການສົ່ງຂອງມັນແມ່ນອັດຕາສ່ວນ inversely ກັບໄລຍະການສົ່ງ, ແລະໄລຍະການສົ່ງສູງສຸດສາມາດບັນລຸໄດ້ເມື່ອອັດຕາຕ່ໍາກວ່າ 20kbps.
* ສະຫນັບສະຫນູນຫຼາຍ nodes. ໂດຍທົ່ວໄປ, ເສັ້ນທາງລົດເມ RS485 ສາມາດຮອງຮັບທາງທິດສະດີໄດ້ 247 nodes ອຸປະກອນ.
(2) Modbus-RTU ອະນຸສັນຍາການສື່ສານ serial
ອະນຸສັນຍາ Modbus ຖືກນໍາໃຊ້ກັບເຄືອຂ່າຍລົດເມອຸດສາຫະກໍາ. ໂດຍຜ່ານພິທີການ, ການສື່ສານຂໍ້ມູນສາມາດປະຕິບັດໄດ້ລະຫວ່າງເຄື່ອງຄວບຄຸມແລະອຸປະກອນພາກສະຫນາມ. ອຸປະກອນທີ່ຜະລິດໂດຍຜູ້ຜະລິດທີ່ແຕກຕ່າງກັນສາມາດປະກອບເປັນລະບົບຕິດຕາມກວດກາເຄືອຂ່າຍລົດເມອຸດສາຫະກໍາປະຕິບັດຕາມພິທີການເປັນເອກະພາບ. ໂປຣໂຕຄໍມີໂຄງສ້າງແມ່ແບບ-ທາດ, ຫນຶ່ງໃນໂຫນດຕົ້ນສະບັບໃນເຄືອຂ່າຍ, ແລະອັນອື່ນໆແມ່ນ slave nodes, ແລະແຕ່ລະ node slave ມີທີ່ຢູ່ອຸປະກອນທີ່ເປັນເອກະລັກ.
ໃນເຄືອຂ່າຍລົດເມ serial, ໂຫມດຕົ້ນສະບັບເລີ່ມຕົ້ນຄໍາສັ່ງ, ແລະອຸປະກອນສໍາລອງທັງຫມົດຈະໄດ້ຮັບຄໍາສັ່ງ. ຄໍາສັ່ງ Modbus ປະກອບດ້ວຍທີ່ຢູ່ຂອງອຸປະກອນສໍາລອງທີ່ປະຕິບັດຄໍາສັ່ງ, ແລະອຸປະກອນສໍາລອງທີ່ກໍານົດໂດຍອຸປະກອນຕົ້ນສະບັບຕອບສະຫນອງກ່ອນແລະຫຼັງຈາກນັ້ນປະຕິບັດຄໍາສັ່ງ. ມີ checksums ໃນຄໍາສັ່ງ Modbus ເພື່ອໃຫ້ແນ່ໃຈວ່າຄໍາສັ່ງທີ່ມາຮອດບໍ່ໄດ້ເສຍຫາຍ.. ຄໍາສັ່ງ Modbus ສາມາດສັ່ງ RTU ໃຫ້ປ່ຽນມູນຄ່າການລົງທະບຽນຂອງມັນ, ອ່ານ ຫຼືຄວບຄຸມພອດ I/O, ແລະສັ່ງໃຫ້ອຸປະກອນສົ່ງຄືນຂໍ້ມູນການລົງທະບຽນໜຶ່ງ ຫຼືຫຼາຍກວ່ານັ້ນ.
Modbus ປະກອບມີ ASCII, RTU ແລະ TCP ສາມປະເພດຂໍ້ຄວາມ. ໂໝດສົ່ງ ASCII, LRC checksum, ປະສິດທິພາບລະບົບສາຍສົ່ງຕ່ໍາ, ແຕ່ intuitive, ງ່າຍດາຍແລະງ່າຍທີ່ຈະ debug. ໂໝດສົ່ງສັນຍານ RTU, ໃຊ້ການກວດສອບ CRC, ປະສິດທິພາບລະບົບສາຍສົ່ງສູງ, ສັບສົນກວ່າ ASCII ເລັກນ້ອຍ. ເວົ້າໂດຍທົ່ວໄປ, ຖ້າຫາກວ່າຈໍານວນຂອງຂໍ້ມູນທີ່ຈະສົ່ງອອກແມ່ນມີຂະຫນາດນ້ອຍ, ທ່ານສາມາດພິຈາລະນາການນໍາໃຊ້ອະນຸສັນຍາ ASCII; ຖ້າຈໍານວນຂໍ້ມູນທີ່ຈະສົ່ງແມ່ນຂ້ອນຂ້າງໃຫຍ່, ມັນດີທີ່ສຸດທີ່ຈະໃຊ້ໂປໂຕຄອນ RTU. ສໍາລັບເຫດຜົນນີ້, ເຄື່ອງມືແລະເຊັນເຊີອັດສະລິຍະຂອງລະບົບນີ້ຮັບຮອງເອົາຮູບແບບການສື່ສານ Modbus-RTU ເປັນເອກະພາບ.
3.2 ການອອກແບບຮາດແວຂອງຕົວຄວບຄຸມພາກສະຫນາມຂອງຫມໍ້ແປງກ່ອງ
ຕົວຄວບຄຸມພາກສະຫນາມຂອງຫມໍ້ແປງກ່ອງແມ່ນປະກອບດ້ວຍລະບົບຝັງຕົວ. ລະບົບຝັງຕົວແມ່ນແອັບພລິເຄຊັນເປັນສູນກາງ, ຊອບແວ ແລະຮາດແວສາມາດປັບແຕ່ງໄດ້, ແລະຮັບຮູ້ອຸປະກອນອັດຕະໂນມັດ, ສະຕິປັນຍາ, ແລະຟັງຊັນການຕິດຕາມໄລຍະໄກ. ມັນສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍ microprocessors ຝັງ, ຮາດແວທີ່ກ່ຽວຂ້ອງ, ລະບົບປະຕິບັດການຝັງ, ແລະລະບົບຊອບແວຄໍາຮ້ອງສະຫມັກ.
(1) ລະບົບຕໍາ່ສຸດທີ່ຂອງ microprocessor STM32
ລະບົບຂັ້ນຕ່ໍາຂອງ microprocessor ຝັງຕົວປະກອບມີ microprocessor ຝັງ, ຣີເຊັດວົງຈອນ ແລະວົງຈອນດີບັກ. ວົງຈອນໂມງໃຫ້ສັນຍານໂມງພາຍນອກທີ່ຕ້ອງການ, ວົງຈອນຣີເຊັດໃຫ້ສະຖານະເບື້ອງຕົ້ນທີ່ເປັນເອກະພາບ, ແລະວົງຈອນ debugging ສະຫນອງການໂຕ້ຕອບສໍາລັບການດາວໂຫຼດໂຄງການແລະ debugging.
* ທາງເລືອກ microprocessor ຝັງ. ອີງຕາມຄວາມຕ້ອງການຂອງລະບົບຕິດຕາມກວດກາການຫັນເປັນປ່ອງອັດສະລິຍະ 10kV ສໍາລັບການປະຕິບັດຂອງຕົວຄວບຄຸມໃນເວັບໄຊ, ລະບົບນີ້ເລືອກຊິບ STM32F103ZET6 ເປັນ microprocessor ຫຼັກຂອງຕົວຄວບຄຸມຢູ່ບ່ອນ.. ໄມໂຄຣໂປຣເຊສເຊີຝັງຕົວ STM32F103ZET6, MCU ມີການເຊື່ອມໂຍງສູງ, ການບໍລິໂພກພະລັງງານຕ່ໍາ, ແລະປະສິດທິພາບຄ່າໃຊ້ຈ່າຍສູງ. ມັນເຫມາະສົມສໍາລັບຄວາມຕ້ອງການຄໍາຮ້ອງສະຫມັກຕ່າງໆໃນຂົງເຂດການແພດອຸດສາຫະກໍາ, ແລະສາມາດຕອບສະຫນອງຄວາມຕ້ອງການຂອງການໄດ້ມາຂໍ້ມູນແລະການປະມວນຜົນໃນເວລາທີ່ແທ້ຈິງຂອງລະບົບນີ້.
* ວົງຈອນ oscillator Crystal. ວົງຈອນ crystal oscillator ສະຫນອງກໍາມະຈອນຄວາມຖີ່ຄົງທີ່ກັບ microprocessor ເພື່ອເຮັດໃຫ້ microprocessor ເຮັດວຽກເປັນປົກກະຕິ.. ໄມໂຄຣໂປຣເຊສເຊີ STM32 ມີ 2 ແກນຜລຶກ, oscillator crystal 8MHz ສະຫນອງໂມງຄວາມໄວສູງພາຍນອກ, ແລະ 32.768KHz crystal oscillator ສະຫນອງໂມງຄວາມໄວຕ່ໍາພາຍນອກ.
* ຣີເຊັດວົງຈອນ. ຫນ້າທີ່ຂອງວົງຈອນປັບ microprocessor ແມ່ນເພື່ອ restart ລະບົບ. ເມື່ອລະບົບລົ້ມເຫລວ, ກົດປຸ່ມຣີເຊັດເພື່ອຣີສະຕາດອຸປະກອນ. ໂດຍທົ່ວໄປ, ວົງຈອນຣີເຊັດໃຊ້ສັນຍານລະດັບຕໍ່າເພື່ອຣີສະຕາດ.
(2) ການອອກແບບວົງຈອນພະລັງງານ
ລະບົບເລືອກການສະຫນອງພະລັງງານພາຍນອກ DC ທີ່ມີແຮງດັນໄຟຟ້າ 12V (2ກ), ແລະເລືອກ DC 5V (2ກ) ອະແດບເຕີພະລັງງານທີ່ມີການໂຕ້ຕອບ USB ເພື່ອສະຫນອງພະລັງງານໃຫ້ກັບຕົວຄວບຄຸມພາກສະຫນາມ. ການສະຫນອງພະລັງງານ 12V DC ແມ່ນເຊື່ອມຕໍ່ກັບກະດານຄວບຄຸມ, ແລະການສະຫນອງພະລັງງານ DC 12V ໄດ້ຖືກເລື່ອນລົງເພື່ອໃຫ້ໄດ້ຮັບການສະຫນອງພະລັງງານ DC 5V ຜ່ານໂມດູນຂັ້ນຕອນລົງ LM2596S. ຫຼັງຈາກນັ້ນ, ແຮງດັນ 5V ແມ່ນຜ່ານຊິບຄວບຄຸມ AMS1117-3.3V ເພື່ອໃຫ້ໄດ້ແຮງດັນ 3.3V ເພື່ອສະຫນອງພະລັງງານໃຫ້ກັບຊິບ STM32.. ແຜນວາດວົງຈອນຂອງ LM2596S ແລະ AMS1117-3.3V ຄວບຄຸມການສະຫນອງພະລັງງານແມ່ນສະແດງຢູ່ໃນຮູບ 8.
(3) RS485 ການໂຕ້ຕອບກັບໂມດູນ TTL
ການໂຕ້ຕອບ RS485 ກັບໂມດູນ TTL ຮັບຮູ້ການແປງສອງທາງແລະການສື່ສານຂອງສັນຍານ RS485 ແລະສັນຍານ TTL, ແຕ່ສັນຍານຕ້ອງໄດ້ຮັບການປະຕິບັດສະລັບກັນ, ແລະບໍ່ສາມາດປະຕິບັດໄດ້ໃນສອງທິດທາງໃນເວລາດຽວກັນ. ອຸປະກອນພາກສະຫນາມທັງຫມົດໃຊ້ໂມດູນນີ້ເພື່ອເຊື່ອມຕໍ່ກັບ microcontroller, ແລະແຜນວາດສາຍໄຟສະແດງຢູ່ໃນຮູບ 9.

Wiring Diagram ຂອງ TFT-LCD ແລະ STM32 MCU - ຮູບ 9
(4) ໂມດູນຈໍ LCD
ເນື່ອງຈາກຕົວຄວບຄຸມຢູ່ໃນບ່ອນຂອງລະບົບຕິດຕາມໄລຍະໄກຂອງກ່ອງຕ້ອງສະແດງຕົວເລກແລະຕົວອັກສອນຫຼາຍ, ຈໍສະແດງຜົນແກ້ວ TFT-LCD ຂະໜາດ 2.8 ນິ້ວຖືກເລືອກເປັນໂມດູນຈໍສະແດງຜົນ, ແລະມີຕົວຄວບຄຸມ ILI9341 ພາຍໃນ. ພິຈາລະນາ STM32 ສາມາດສື່ສານກັບ ILI9341 ຜ່ານການໂຕ້ຕອບ SPI, 8080 ການໂຕ້ຕອບຫຼືການໂຕ້ຕອບ RGB. ເພື່ອບັນລຸອັດຕາການໂຫຼດຫນ້າຈໍຄືນໄວຂຶ້ນ, ໃຊ້ TFT-LCD 8080 ການໂຕ້ຕອບລົດເມຂໍ້ມູນຂະຫນານ. STM32 ສົ່ງຂໍ້ມູນໄປຍັງໜ່ວຍຄວາມຈຳຕົວຄວບຄຸມ ILI9341 ຜ່ານໂມດູນໜ່ວຍຄວາມຈຳສະຖິດທີ່ປ່ຽນແປງໄດ້ FSMC.
(5) ໂມດູນເຕືອນດ້ວຍສຽງ
ເມື່ອ microprocessor STM32 ກວດພົບວ່າມີຄວາມຜິດປົກກະຕິຫຼືຄວາມຜິດໃນຂໍ້ມູນການດໍາເນີນງານຂອງຫມໍ້ແປງກ່ອງ., ມັນຈະສົ່ງຂໍ້ຄວາມໄປຫາພອດ serial ແລະເລີ່ມສຽງເຕືອນ. ໂມດູນປຸກສຽງເລືອກຊິບສຽງທີ່ໃຊ້ທົ່ວໄປ SYN6288, ແລະອອກອາກາດຂໍ້ມູນເຕືອນດ້ວຍສຽງໂດຍອັດຕະໂນມັດຕາມໂປຣແກຣມທີ່ຕັ້ງໄວ້. ລະບົບໃຊ້ລະຫັດ GB2312, ທີ່ເຫມາະສົມສໍາລັບການແລກປ່ຽນຂໍ້ມູນຂ່າວສານໃນການປຸງແຕ່ງຕົວອັກສອນຈີນແລະການສື່ສານຕົວອັກສອນຈີນ. SYN6288 ຍັງຮັບຮູ້ຕົວເລກໄດ້ຢ່າງຖືກຕ້ອງ, ເວລາແລະວັນທີ, ແລະຫົວໜ່ວຍວັດແທກທີ່ໃຊ້ທົ່ວໄປ.
(6) ໂມດູນ Relay
ຕົວຄວບຄຸມພາກສະຫນາມເລືອກກຸ່ມຂອງໂມດູນ relay isolation optocoupler 2 ທາງເພື່ອຄວບຄຸມການເປີດແລະປິດຂອງກະດິ່ງປຸກ DC 12V ແລະພັດລົມ., ແລະ Relay 220V AC Solid State ສາມາດເລືອກໄດ້ຕາມປະເພດການສະຫນອງພະລັງງານແລະພະລັງງານຂອງພັດລົມແບບກ່ອງ.. ແຕ່ລະໂມດູນວົງຈອນ relay ມີການຕິດຕໍ່ປົກກະຕິເປີດແລະປິດປົກກະຕິ, ເຊັ່ນດຽວກັນກັບຕົວຊີ້ບອກສະຖານະ LED; ແຕ່ລະວົງຈອນ relay ຖືກແຍກອອກໂດຍ optocouplers, ແລະມີ diode freewheeling ເພື່ອປົດປ່ອຍແຮງດັນ induced ຂອງ relay ແລະປົກປັກຮັກສາວົງຈອນທີ່ຜ່ານມາ. ເມື່ອອຸນຫະພູມອາກາດລ້ອມຮອບຂອງຫມໍ້ແປງກ່ອງເກີນຂອບເຂດທີ່ແນ່ນອນ, ຕົວຄວບຄຸມຢູ່ໃນສະຖານທີ່ໃຫ້ຜົນໄດ້ຮັບໃນລະດັບສູງ, ແລະຫນຶ່ງ relay ແຍກ optocoupler ເຮັດຫນ້າທີ່ເປີດພັດລົມເພື່ອເຮັດໃຫ້ເຢັນລົງ; ເມື່ອຄວາມຜິດຮ້າຍແຮງເຊັ່ນ: ຄວາມເຂັ້ມຂຸ້ນຂອງຄວັນໄຟຫຼາຍເກີນໄປເກີດຂຶ້ນ, ຕົວຄວບຄຸມຂັບ relay ການແຍກ optocoupler ອີກອັນຫນຶ່ງເພື່ອເຊື່ອມຕໍ່ ຮອບລະຄັງປຸກຈະສົ່ງສັນຍານເຕືອນຢູ່ໃນສະຖານທີ່.. ສໍາລັບແຜນວາດຫຼັກການເຮັດວຽກຂອງ Relay ແລະແຜນວາດການເຊື່ອມຕໍ່ລະຫວ່າງໂມດູນ Relay ແລະຊິບ STM32, ກະລຸນາຕິດຕໍ່ຜູ້ຜະລິດແລະສົ່ງຄໍາຮ້ອງຂໍ.
(7) ໂມດູນການສື່ສານ
ອີງຕາມຂໍ້ກໍານົດການອອກແບບຂອງ 10kV ກ່ອງອັດສະລິຍະລະບົບຕິດຕາມກວດກາໄລຍະໄກ transformer, ການສື່ສານລະຫວ່າງເຄື່ອງຫັນປ່ຽນກ່ອງອັດສະລິຍະ ແລະຄລາວເລືອກວິທີການສື່ສານໄຮ້ສາຍ GPRS ທີ່ມີຄ່າໃຊ້ຈ່າຍໃນການຈະລາຈອນຕໍ່າ.. ໂມດູນ GPRS ເຟີມແວ Gizwits.
*ໂມດູນ GPRS ເຟີມແວ Gizwits (ເຟີມແວ G510_GAgent). ໂມດູນນີ້ແມ່ນໂຄງການຄໍາຮ້ອງສະຫມັກທີ່ເຮັດວຽກຢູ່ໃນໂມດູນການສື່ສານຕ່າງໆ, ສະຫນອງຫນ້າທີ່ເຊັ່ນການສົ່ງສອງທາງຂອງຟັງແລະຂໍ້ມູນອຸປະກອນຜະລິດຕະພັນ, ການຕັ້ງຄ່າອຸປະກອນເຂົ້າໄປໃນເຄືອຂ່າຍ, ການຄົ້ນພົບແລະການຜູກມັດ, ແລະການຍົກລະດັບໂຄງການ. ແຜນວາດວົງຈອນລະຫວ່າງໂມດູນ GPRS ແລະຕົວຄວບຄຸມຕົ້ນຕໍສາມາດໄດ້ຮັບໂດຍການຕິດຕໍ່ກັບຜູ້ຜະລິດ.
*ໂມດູນ GPRS-GA6. ໂມດູນນີ້ສາມາດຮັບຮູ້ການຖ່າຍທອດສຽງ, ຂໍ້ຄວາມສັ້ນ ແລະຂໍ້ມູນທີ່ມີການໃຊ້ພະລັງງານຕໍ່າ. ມັນເຫມາະສົມສໍາລັບຄວາມຕ້ອງການຂອງການອອກແບບຕ່າງໆໃນຄໍາຮ້ອງສະຫມັກ M2M, ໂດຍສະເພາະສໍາລັບການອອກແບບຜະລິດຕະພັນທີ່ຫນາແຫນ້ນ. ອັນທີສອງ, ອະນຸສັນຍາການສື່ສານຮັບຮອງເອົາ UART ການສົ່ງລົດເມພອດ serial, ໃຊ້ຄໍາສັ່ງ AT ມາດຕະຖານເພື່ອຄວບຄຸມໂມດູນ, ແລະເລືອກອັດຕາ baud ຂອງ 115200bps. ຕິດຕໍ່ ຜູ້ຜະລິດ IoT ສໍາລັບແຜນວາດວົງຈອນການເຊື່ອມຕໍ່ຂອງໂມດູນ GPRS-GA6 ແລະ microcontroller STM32.
3.3 ອຸປະກອນການປົກປັກຮັກສາທີ່ສົມບູນແບບ Microcomputer
ອີງຕາມຂໍ້ກໍານົດການອອກແບບການປ້ອງກັນການຫັນເປັນພະລັງງານ (GB/T 50062-2008), 10kV transformers ປົກກະຕິແລ້ວຈໍາເປັນຕ້ອງໄດ້ຕິດຕັ້ງການປ້ອງກັນ overcurrent ກັບກໍານົດເວລາ. ອຸປະກອນປ້ອງກັນ microcomputer ມີການປົກປ້ອງ, ຫນ້າທີ່ວັດແທກແລະຄວບຄຸມຂອງຫມໍ້ແປງແລະສາຍ, ເຊັ່ນດຽວກັນກັບຫນ້າທີ່ຂອງການໄດ້ມາຂໍ້ມູນ, ການຕິດຕາມແລະລະບົບການກວດກາຕົນເອງ, ແລະມີຄວາມອ່ອນໄຫວສູງແລະຄວາມຫນ້າເຊື່ອຖື.
ອີງຕາມຂໍ້ກໍານົດການອອກແບບຂອງການປ່ຽນແປງກ່ອງອັດສະລິຍະ 10kV ໃນອາພາດເມັນຂອງນັກຮຽນ, ອຸປະກອນປ້ອງກັນທີ່ສົມບູນຂອງເຄື່ອງຄອມພິວເຕີຈຸນລະພາກປະຈຸບັນ Ankerui AM3-I ທີ່ມີຟັງຊັນການສື່ສານ RS485 ຖືກເລືອກ., ກັບ IA, IB, ໄອຊີ, UA, UB, UC, ປ, ຖາມ, Fr ແລະການວັດແທກພາລາມິເຕີໄຟຟ້າອື່ນໆ, 8-ຊ່ອງສັນຍານສະຫຼັບພາຍນອກທີ່ໄດ້ມາ, ແລະ breaker ວົງຈອນການຄວບຄຸມໄລຍະໄກເປີດແລະປິດການດໍາເນີນງານແລະຫນ້າທີ່ອື່ນໆ. ແຜນວາດປາຍສາຍໄຟຂອງອຸປະກອນປ້ອງກັນໄມໂຄຄອມພິວເຕີ AM3-I ມີດັ່ງນີ້:

ແຜນວາດປາຍສາຍໄຟຂອງອຸປະກອນປ້ອງກັນໄມໂຄຄອມພິວເຕີ AM3-I
3.4. ເຄື່ອງວັດແທກເຄືອຂ່າຍອັດສະລິຍະ
ເຄື່ອງວັດແທກເຄືອຂ່າຍອັດສະລິຍະແມ່ນໃຊ້ເພື່ອກວດຫາຕົວກໍານົດການໄຟຟ້າເຊັ່ນ: ປັດຈຸບັນສາມເຟດ, ແຮງດັນແລະພະລັງງານຂອງວົງຈອນກະຈາຍພະລັງງານແຮງດັນຕ່ໍາ, ເຊັ່ນດຽວກັນກັບສະຖານະການເປີດແລະປິດຂອງສະຫວິດທີ່ໂດດດ່ຽວແລະຕົວຕັດວົງຈອນ. ອີງຕາມຂໍ້ກໍານົດການອອກແບບຂອງລະບົບຮອງຂອງຫມໍ້ແປງກ່ອງອັດສະລິຍະ 10kV, ເຄື່ອງວັດແທກເຄືອຂ່າຍອັດສະລິຍະ Ankerui ACR ທີ່ມີຟັງຊັນການສື່ສານ RS485 ຖືກເລືອກ, ແລະແຜນວາດສາຍໄຟຂອງເຄື່ອງວັດແທກເຄືອຂ່າຍອັດສະລິຍະ ACR ແລະໝໍ້ແປງກະແສໄຟຟ້າແຮງດັນຕໍ່າ ແລະແຜນວາດສາຍສາຍຂອງສະວິດເຂົ້າ ແລະຜົນຜະລິດຖືກເລືອກ..
ACR smart network meter ໝໍ້ແປງກະແສໄຟຟ້າແຮງຕໍ່າ ແລະແຜນວາດສາຍສາຍໄຟດິຈິຕອລ
ເຄື່ອງວັດແທກເຄືອຂ່າຍອັດສະລິຍະ ACR ນຳໃຊ້ໂປຣໂຕຄໍ Modbus-RTU, ເຊິ່ງສາມາດວັດແທກແລະເກັບກໍາຕົວກໍານົດການພະລັງງານ. ຟັງຊັນການປ້ອນຂໍ້ມູນຂອງສະວິດສາມາດກວດພົບສະຖານະສະຫຼັບຂອງສະວິດທີ່ໂດດດ່ຽວ ແລະຕົວຕັດວົງຈອນ, ແລະຟັງຊັນຜົນຜະລິດ Relay ສາມາດເປີດແລະປິດເຄື່ອງຕັດວົງຈອນໄດ້ຈາກໄລຍະໄກ. ເຄື່ອງວັດແທກເຄືອຂ່າຍອັດສະລິຍະ ACR ມີແຜນການລວມສໍາລັບຕາຕະລາງທີ່ຢູ່ການສື່ສານ, ເຊິ່ງສາມາດຮັບຮູ້ສາມຫນ້າທີ່ຫ່າງໄກສອກຫຼີກຂອງ telemetry, ສັນຍານຫ່າງໄກສອກຫຼີກແລະການຄວບຄຸມໄລຍະໄກ.
(1) ການແປງ AD ແລະການຄິດໄລ່ຂອງສັນຍານ AC analog
ໄດ້ 3 ສັນຍານແຮງດັນໄລຍະແລະ 3 ສັນຍານປະຈຸບັນ (ສັນຍານຜົນຜະລິດຂອງ transformer ໃນປັດຈຸບັນ) ເກັບກໍາຂໍ້ມູນໂດຍກົງໂດຍເຄື່ອງວັດແທກເຄືອຂ່າຍ smart ACR ແມ່ນປະລິມານການປຽບທຽບທັງຫມົດ, ເຊິ່ງຈໍາເປັນຕ້ອງໄດ້ປ່ຽນເປັນສັນຍານດິຈິຕອນທີ່ສາມາດຮັບຮູ້ໄດ້ໂດຍ CPU ສໍາລັບການປະມວນຜົນຂໍ້ມູນ. ທໍາອິດ, ໄດ້ 3 ແຮງດັນໄຟຟ້າໄລຍະ 220V ແລະ 3 ການປຽບທຽບໃນປະຈຸບັນຖືກປ່ຽນເປັນສັນຍານແຮງດັນຕໍ່າຜ່ານຕົວແປງ, ແລະປ່ຽນເປັນແຮງດັນທີ່ອະນຸຍາດໂດຍ AD converter ຜ່ານ loop ສ້າງແຮງດັນ; , ປ່ຽນເປັນສັນຍານດິຈິຕອນໂດຍ AD ແລະປ້ອນເຂົ້າ CPU. ແຜນວາດແຜນວາດຂອງຕົວຢ່າງ ແລະຂະບວນການປ່ຽນ AD ຂອງປະລິມານການປຽບທຽບ AC ສາມາດໄດ້ຮັບໂດຍການຕິດຕໍ່ຜູ້ຜະລິດ.
* ການປ່ຽນແຮງດັນແບບອະນາລັອກ ແລະການກັ່ນຕອງຕໍ່າຜ່ານ. ຫນ້າທີ່ຂອງວົງຈອນການສ້າງແຮງດັນແມ່ນການແຍກໄຟຟ້າແລະການຫັນປ່ຽນໄຟຟ້າ. ໂດຍທົ່ວໄປ, ຕົວແປງສັນຍານ AD ຕ້ອງການສັນຍານເຂົ້າເປັນ ±5V ແລະ ±10V, ດັ່ງນັ້ນອັດຕາສ່ວນການຫັນປ່ຽນຂອງຕົວແປງແຮງດັນສາມາດຖືກກໍານົດ. ການກັ່ນຕອງຜ່ານຕ່ໍາແມ່ນແບ່ງອອກເປັນຕົວກອງ passive ແລະຕົວກອງທີ່ໃຊ້ວຽກ. ຕົວກອງທີ່ໃຊ້ໄດ້ແມ່ນປະກອບດ້ວຍຕົວເກັບປະຈຸ, resistors ແລະເຄື່ອງຂະຫຍາຍສຽງປະຕິບັດງານປະສົມປະສານ, ທີ່ຂະຫຍາຍສັນຍານໃນຂະນະທີ່ການກັ່ນຕອງ. ຕົວກອງແບບ Passive ມີພຽງແຕ່ຟັງຊັນການກັ່ນຕອງແຕ່ບໍ່ມີຫນ້າທີ່ຂະຫຍາຍສັນຍານ.
* ການເກັບຕົວຢ່າງສັນຍານອະນາລັອກ. The sampling process should follow Shannon's sampling theorem, ນັ້ນແມ່ນ, ຄວາມຖີ່ຂອງການເກັບຕົວຢ່າງຕ້ອງບໍ່ໜ້ອຍກວ່າ 2 ເທົ່າຂອງຄວາມຖີ່ສູງສຸດຂອງສັນຍານເຂົ້າ. ຂະບວນການເກັບຕົວຢ່າງແມ່ນໄວຫຼາຍ. ການເກັບຕົວຢ່າງຕົວແປງ AD ໃນປັດຈຸບັນໄດ້ບັນລຸລະດັບ nanosecond, ໃນຂະນະທີ່ໄລຍະເວລາການເກັບຕົວຢ່າງຂອງອຸປະກອນອັດຕະໂນມັດຂອງລະບົບພະລັງງານແມ່ນຢູ່ໃນລະດັບ millisecond, ດັ່ງນັ້ນແຮງດັນແລະສັນຍານປະຈຸບັນຂອງຫົກ loops ສາມາດແບ່ງປັນຫນຶ່ງ AD converter, ແຕ່ວົງຈອນການເກັບຕົວຢ່າງຕ້ອງມີອຸປະກອນຕົວຢ່າງແລະຖືແລະສະຫຼັບ multiplexer.
* AD ແປງ. AD converters ປະກອບມີປະມານຢ່າງຕໍ່ເນື່ອງ, ປະສົມປະສານ, ການນັບ, ການປຽບທຽບຂະຫນານ, ແລະເຄື່ອງແປງແຮງດັນ-ຄວາມຖີ່ VFC. ຕົວປ່ຽນ AD ໂດຍປະມານຢ່າງຕໍ່ເນື່ອງແມ່ນຕົວແທນຂອງທັງຄວາມໄວແລະຄວາມແມ່ນຍໍາໃນ ADC, ແລະມັນມີຄວາມລະອຽດການແປງທີ່ສູງຂຶ້ນໃນອັດຕາການປ່ຽນແປງທີ່ສູງຂຶ້ນ.
(2) ຂັ້ນຕອນການລວມມູນຄ່າຢ່າງແທ້ຈິງເຄິ່ງວົງຈອນຂອງປະລິມານໄຟຟ້າ sinusoidal
ກຸນແຈຂອງຊອບແວ algorithm ແມ່ນເພື່ອປັບປຸງຄວາມຖືກຕ້ອງແລະຄວາມໄວຂອງການດໍາເນີນງານ algorithm.. ກຸນແຈຂອງຂັ້ນຕອນການເກັບຕົວຢ່າງ AC ຂອງເຄື່ອງວັດແທກອັດສະລິຍະແມ່ນການແກ້ໄຂວິທີການຄິດໄລ່ຄວາມກວ້າງຂອງກາງຫຼືມູນຄ່າທີ່ມີປະສິດທິພາບຂອງສັນຍານການເກັບຕົວຢ່າງ sinusoidal ຕາມຄ່າທັນທີຂອງສັນຍານ sinusoidal.. ສູດການຄິດໄລ່ທີ່ໃຊ້ທົ່ວໄປທີ່ສຸດສໍາລັບປະລິມານຊີນແມ່ນຂັ້ນຕອນການລວມມູນຄ່າຢ່າງແທ້ຈິງເຄິ່ງວົງຈອນ.. ຫຼັກການຂອງສູດການລວມມູນຄ່າສົມບູນເຄິ່ງວົງຈອນແມ່ນວ່າປະສົມປະສານຂອງມູນຄ່າສົມບູນຂອງປະລິມານ sine ໃນເຄິ່ງວົງຈອນແມ່ນຄົງທີ່ S., ແລະຄ່າຄົງທີ່ S ບໍ່ມີຫຍັງກ່ຽວຂ້ອງກັບມຸມເລີ່ມຕົ້ນ . ຂັ້ນຕອນການລວມມູນຄ່າຢ່າງແທ້ຈິງເຄິ່ງວົງຈອນໂດຍອີງໃສ່ຮູບແບບການທໍາງານຂອງ sine ແມ່ນສະແດງຢູ່ໃນຮູບ 19.

ສູດການຄິດໄລ່ຂອງການລວມມູນຄ່າຢ່າງແທ້ຈິງເຄິ່ງວົງຈອນໂດຍອີງໃສ່ຮູບແບບການທໍາງານຂອງ sine
ການສະແດງຜົນສຳລັບການຄິດໄລ່ຄ່າປະສິດທິພາບຂອງກະແສໄຟຟ້າໂດຍໃຊ້ສູດການຄິດໄລ່ມູນຄ່າສົມບູນແບບເຄິ່ງວົງຈອນແມ່ນສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້:

ໃນສູດ, S ເປັນຕົວແທນຂອງມູນຄ່າຢ່າງແທ້ຈິງພາຍໃນເຄິ່ງຫນຶ່ງຂອງຮອບວຽນ; ຂ້ອຍເປັນຕົວແທນຂອງມູນຄ່າທີ່ມີປະສິດທິພາບຂອງປະຈຸບັນ; ຂ້ອຍເປັນຕົວແທນຂອງມູນຄ່າທັນທີທັນໃດຂອງປະຈຸບັນ; w ເປັນຕົວແທນຂອງຄວາມໄວເປັນລ່ຽມ; T ເປັນຕົວແທນຂອງວົງຈອນພະລັງງານ AC; f ເປັນຕົວແທນຂອງຄວາມຖີ່ຂອງພະລັງງານ AC; N ເປັນຕົວແທນຂອງຈໍານວນຕົວຢ່າງໃນຫນຶ່ງຮອບວຽນ ; Ts ເປັນຕົວແທນໄລຍະເວລາການເກັບຕົວຢ່າງ.
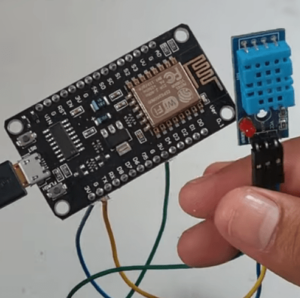
3.5 RS485 ເຊັນເຊີອຸນຫະພູມແລະຄວາມຊຸ່ມຊື່ນຄວັນຢາສູບ
ພິຈາລະນາວ່າສາຍການສະຫນອງພະລັງງານໃນຫມໍ້ແປງປະເພດກ່ອງອາດມີການຮົ່ວໄຫຼ, ເກີນ, ວົງຈອນສັ້ນແລະການຕໍ່ຕ້ານການຕິດຕໍ່ຫຼາຍເກີນໄປ, ເຊິ່ງອາດເຮັດໃຫ້ເກີດໄຟໄໝ້ໄດ້, ແລະຄວາມລົ້ມເຫຼວຂອງຫມໍ້ແປງນ້ໍາມັນເຊື້ອໄຟອາດຈະເຮັດໃຫ້ເກີດໄຟໄຫມ້. ເພາະສະນັ້ນ, ມັນເປັນສິ່ງຈໍາເປັນທີ່ຈະຕິດຕັ້ງເຊັນເຊີຄວັນໄຟໃນຫມໍ້ແປງປະເພດກ່ອງເພື່ອກວດຫາໄຟຂອງຫມໍ້ແປງປະເພດກ່ອງ. ເພື່ອກວດພົບຄວາມລົ້ມເຫລວທີ່ອາດຈະເກີດຂື້ນໃນໄວ. ເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງຂອງການວັດແທກແລະຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍໃນເວລາດຽວກັນ, ອຸນຫະພູມ RS485, ເຊັນເຊີສາມໃນຫນຶ່ງຄວາມຊຸ່ມຊື່ນແລະຄວັນໄຟຖືກນໍາໃຊ້ເພື່ອກວດຫາອຸນຫະພູມ, ຄວາມຊຸ່ມຊື່ນແລະຄວາມເຂັ້ມຂົ້ນຂອງຄວັນຢາສູບຢູ່ໃນຫມໍ້ແປງກ່ອງ. ໄດ້ ເຊັນເຊີອຸນຫະພູມແລະຄວາມຊຸ່ມຊື່ນ ໃຊ້ probe SHT30. ການກະໂດດຢູ່ບ່ອນ ແລະ ການລົບກວນຂອງກຳມະຈອນ. ເຊັນເຊີມີ 4 ສາຍໄຟ: ສີແດງ, ສີດໍາ, ສີເຫຼືອງ, ແລະສີຂຽວ. ສໍາລັບວິທີການສາຍໄຟສະເພາະຂອງເຊັນເຊີຄວັນໄຟອຸນຫະພູມແລະຄວາມຊຸ່ມຊື່ນ, ກະລຸນາຕິດຕໍ່ຜູ້ຜະລິດ IoT.
ເຄື່ອງວັດແທກອັດສະລິຍະ ແລະເຊັນເຊີທີ່ອອກແບບໃນລະບົບນີ້ນຳໃຊ້ໂປຣໂຕຄໍ Modbus-RTU, ເຊິ່ງສາມາດສື່ສານຄວາມເຊື່ອຖືໄດ້ພາຍໃນຂອບເຂດອັດຕາ baud ເຕັມຂອງ 1200-115200. ອັດຕາ baud ຂອງ smart ແມັດ ແລະເຊັນເຊີຖືກຕັ້ງເປັນ 9600bps ເທົ່າທຽມກັນ. ຮູບແບບການສົ່ງຂໍ້ມູນແລະຮູບແບບການແປງຂໍ້ມູນຂອງເຊັນເຊີມີດັ່ງນີ້:
ຮູບແບບກອບການສອບຖາມຂໍ້ມູນເຊັນເຊີ. ເຊັນເຊີປະຕິບັດຕາມມາດຕະຖານ Modbus-RTU protocol, ແລະການອ່ານເຊັນເຊີຖືກເກັບໄວ້ໃນທະບຽນການຖື, ແລະລະຫັດຟັງຊັນແມ່ນ 04. ຄອມພິວເຕີຊັ້ນເທິງອ່ານຮູບແບບກອບການສອບຖາມຂໍ້ມູນເຊັນເຊີ, ແລະຮູບແບບການສອບຖາມຂໍ້ມູນເຊັນເຊີຄອມພິວເຕີຕ່ໍາກວ່າ.
3.6 ເຄື່ອງສົ່ງອຸນຫະພູມ PT100 - ຫຼັກການເຮັດວຽກຂອງ RTD PT100 - ຫຼັກການເຮັດວຽກຂອງເຊັນເຊີອຸນຫະພູມ
ເຄື່ອງສົ່ງອຸນຫະພູມ PT100 ຖືກນໍາໃຊ້ເພື່ອກວດຫາອຸນຫະພູມຮ່າງກາຍຂອງຕົວປ່ຽນ, ອຸນຫະພູມສາຍໄຟແຮງດັນສູງ ແລະແຮງດັນຕໍ່າ, ມັນເຫມາະສົມສໍາລັບສະຖານທີ່ອຸດສາຫະກໍາຕ່າງໆ. Transformer ຈະຜະລິດການສູນເສຍໃນລະຫວ່າງການປະຕິບັດງານ, ສ່ວນໃຫຍ່ແມ່ນການສູນເສຍທາດເຫຼັກແລະການສູນເສຍທອງແດງ, ຍັງເອີ້ນວ່າການສູນເສຍຫຼັກ ແລະການສູນເສຍການໂຫຼດ. ການສູນເສຍທອງແດງແຕກຕ່າງກັນກັບປະຈຸບັນການໂຫຼດແລະເປັນອັດຕາສ່ວນກັບສີ່ຫລ່ຽມຂອງປະຈຸບັນການໂຫຼດ. ສູດການຄິດໄລ່ການສູນເສຍຂອງ Transformer ມີດັ່ງນີ້:
ໃນສູດ, P0 ເປັນຕົວແທນຂອງພະລັງງານທີ່ມີການເຄື່ອນໄຫວຂອງຫມໍ້ແປງໃນການດໍາເນີນງານທີ່ບໍ່ມີການໂຫຼດຢູ່ທີ່ແຮງດັນທີ່ຖືກຈັດອັນດັບ; I1 ແລະ I2 ເປັນຕົວແທນຂອງກະແສໄຟຟ້າແຮງດັນສູງ ແລະ ກະແສໄຟຟ້າແຮງດັນຕໍ່າ; R1 ແລະ R2 ເປັນຕົວແທນຂອງຄວາມຕ້ານທານດ້ານແຮງດັນສູງແລະຄວາມຕ້ານທານດ້ານແຮງດັນຕ່ໍາ.
ເຄື່ອງສົ່ງອຸນຫະພູມ PT100 ຖືກຝັງດ້ວຍການໂຕ້ຕອບລົດເມ RS485, ແລະເຄື່ອງສົ່ງອຸນຫະພູມແຕ່ລະຄົນສາມາດເຊື່ອມຕໍ່ກັບ 4 ເຊັນເຊີອຸນຫະພູມ PT100.
3.7 ຫຼັກການການເຮັດວຽກຂອງເຄື່ອງສົ່ງນ້ໍາ immersion
ເນື່ອງຈາກລະດັບນ້ໍາຕ່ໍາຂອງອຸປະກອນ substation ຫ້ອງການພື້ນຖານ, ມັກຈະມີນ້ໍາສະສົມຢູ່ໃນຮ່ອງສາຍເຄເບີ້ນແລະຂຸມຮາກຖານຫຼັງຈາກຝົນຕົກຫນັກ, ແລະມີຄວາມສ່ຽງດ້ານຄວາມປອດໄພຂອງການຮົ່ວໄຫຼຂອງສາຍເຄເບີນ, ດັ່ງນັ້ນ, ການກວດກາແລະການລະບາຍນ້ໍາບໍ່ເປັນປົກກະຕິແມ່ນຈໍາເປັນ. ໃນການອອກແບບນີ້, ເຊັນເຊີ immersion ນ້ໍາຖືກນໍາໃຊ້ເພື່ອກວດພົບການສະສົມນ້ໍາໃນຂຸມພື້ນຖານຂອງ substructure ກ່ອງ.. ເຊັນເຊີການແຊ່ນ້ໍາໃຊ້ຫຼັກການຂອງການນໍາຂອງແຫຼວ, ແລະໃຊ້ electrodes ເພື່ອກວດພົບວ່າມີນ້ໍາຫຼືບໍ່. ເລືອກເຄື່ອງກວດຈັບການແຊ່ນ້ໍາປະເພດຕິດຕໍ່ທີ່ມີຟັງຊັນການສື່ສານ RS485. ຫຼັກການການເຮັດວຽກຂອງເຄື່ອງກວດຈັບການແຊ່ນ້ໍາແມ່ນສະແດງຢູ່ໃນຮູບ 23.
4. ການອອກແບບຊອບແວລະບົບ
ການອອກແບບຊອບແວລະບົບປະກອບມີສອງພາກສ່ວນ: the field bus LAN software design of the box-type transformer and the remote monitoring system design of the box-type transformer based on the Gizwits cloud platform. ອຸປະກອນປ້ອງກັນແບບປະສົມປະສານຂອງໄມໂຄຄອມພິວເຕີ, ເຄື່ອງວັດແທກເຄືອຂ່າຍອັດສະລິຍະ ແລະເຊັນເຊີອັດສະລິຍະໃນລົດເມພາກສະຫນາມ ເຄືອຂ່າຍທ້ອງຖິ່ນຂອງໝໍ້ແປງກ່ອງມີຊອບແວແອັບພລິເຄຊັນທີ່ຝັງໄວ້, ສະນັ້ນພຽງແຕ່ການອອກແບບໂຄງການຊອບແວຂອງການຄວບຄຸມພາກສະຫນາມຂອງການຫັນເປັນປ່ອງແມ່ນຕ້ອງການ.
4.1 ການອອກແບບຊອບແວຄວບຄຸມພາກສະຫນາມສໍາລັບການຫັນເປັນປ່ອງ
ຕົວຄວບຄຸມພາກສະຫນາມຂອງຫມໍ້ແປງກ່ອງແມ່ນລະບົບຝັງຕົວ, ແລະລະບົບຊອບແວຂອງມັນແມ່ນປະກອບດ້ວຍໂຄງການຄໍາຮ້ອງສະຫມັກ, API, ລະບົບປະຕິບັດການຝັງແລະ BSP (ຊຸດສະຫນັບສະຫນູນກະດານ). ອີງຕາມຄຸນລັກສະນະຂອງຕົວກໍານົດການຫຼາຍ, ວຽກງານຫຼາຍຢ່າງແລະຄວາມຕ້ອງການໃນເວລາທີ່ແທ້ຈິງທີ່ເກັບກໍາໂດຍຜູ້ຄວບຄຸມພາກສະຫນາມຂອງຫມໍ້ແປງກ່ອງອັດສະລິຍະ 10kV., μC/OS-Ⅲ ຝັງລະບົບປະຕິບັດການໃນເວລາຈິງ, ທີ່ຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນການພັດທະນາຜະລິດຕະພັນການຄ້າແລະການຄົ້ນຄວ້າການສອນ, ຖືກເລືອກ. μC/OS-Ⅲ ຖືວ່າວຽກງານເປັນຫົວໜ່ວຍນ້ອຍທີ່ສຸດ, ແລະວຽກງານໃດກໍ່ຕາມບໍ່ຈໍາເປັນຕ້ອງສົນໃຈວິທີການຄຸ້ມຄອງຊັບພະຍາກອນສະເພາະ, ເຊິ່ງຖືກກໍານົດໂດຍລະບົບປະຕິບັດການ.
4.2 ການອອກແບບໂຄງການຊອບແວຂອງຕົວຄວບຄຸມພາກສະຫນາມຂອງຫມໍ້ແປງປະເພດກ່ອງ
ການອອກແບບລະບົບຊອບແວທັງໝົດແມ່ນອີງໃສ່ລະບົບການແຈກຢາຍທີ່ປະກອບດ້ວຍເຄື່ອງມືອັດສະລິຍະ, ເຊັນເຊີ, ຕົວຄວບຄຸມພາກສະຫນາມແລະເວທີຟັງ, ແລະການອອກແບບແລະການພັດທະນາຂອງຊອບແວຄໍາຮ້ອງສະຫມັກແມ່ນດໍາເນີນ. ການສົ່ງຂໍ້ມູນແລະການແລກປ່ຽນ, ຕົວຄວບຄຸມຢູ່ໃນເວັບໄຊ ແລະເຊີບເວີຄລາວຂອງ Gizwits ໃຊ້ໂປຣໂຕຄໍການສື່ສານ Gizwits ໃນເຟີມແວ GPRS ສຳລັບການສົ່ງຂໍ້ມູນ ແລະການແລກປ່ຽນ.. ຕາຕະລາງການໄຫຼເຂົ້າຂອງໂປແກມຫຼັກຂອງຊອບແວຄໍາຮ້ອງສະຫມັກຄວບຄຸມພາກສະຫນາມຂອງຫມໍ້ແປງປະເພດກ່ອງ.
*ໂຄງການຕົ້ນຕໍຂອງຊອບແວ. ທໍາອິດ, ເລີ່ມຕົ້ນທຸກພາກສ່ວນຂອງລະບົບ, ເຊັ່ນ GPIO, ພອດ serial, ໂມງ, ການຄຸ້ມຄອງຄວາມຊົງຈໍາ, ແລະອື່ນໆ, ແລະສ້າງວຽກງານໃນ μC/OS-Ⅲ. STM32 ປະຕິບັດການເກັບຂໍ້ມູນ ແລະປະມວນຜົນຂໍ້ມູນເຊັນເຊີ, ແລະສົ່ງຂໍ້ມູນທີ່ຖືກຕ້ອງໄປຫາຈໍ LCD. ໃນເວລາດຽວກັນ, STM32 ສົ່ງຄໍາສັ່ງ AT ໄປຫາໂມດູນ GPRS-G510, ແລກປ່ຽນຂໍ້ມູນ, ເຊື່ອມຕໍ່ກັບແພລະຕະຟອມຄລາວຂອງ Gizwits ຜ່ານໂປໂຕຄອນ LwM2M, ແລະຕັດສິນວ່າໂມດູນການສື່ສານ GPRS ຖືກເຊື່ອມຕໍ່ຢ່າງສໍາເລັດຜົນກັບເຄື່ອງແມ່ຂ່າຍຄລາວ Gizwits. ຖ້າການເຊື່ອມຕໍ່ປະສົບຜົນສໍາເລັດ, ການສົ່ງຂໍ້ມູນແມ່ນປະຕິບັດ. ຫຼັງຈາກນັ້ນ, ຕັດສິນວ່າຂໍ້ມູນທີ່ຖືກປຸງແຕ່ງແມ່ນໃຫຍ່ກວ່າຂອບເຂດທີ່ກໍານົດໄວ້.
ຖ້າມັນເປັນຄວາມລົ້ມເຫຼວເລັກນ້ອຍຂອງສະຖານີຍ່ອຍກ່ອງ, ສົ່ງຂໍ້ມູນຂໍ້ມູນກັບ APP ມືຖືໂດຍຜ່ານເວທີຟັງໄດ້; ຖ້າມັນເປັນຄວາມລົ້ມເຫລວທົ່ວໄປ, ສົ່ງຂໍ້ມູນການປຸກຂໍ້ມູນກັບ APP ມືຖືໂດຍຜ່ານເວທີຟັງໄດ້, ແລະເລີ່ມໂມດູນການສື່ສານ GPRS-GA6 ເພື່ອສົ່ງຂໍ້ມູນປຸກຜ່ານ SMS ໂທລະສັບມືຖື; ຖ້າ ຫາກ ວ່າ ມັນ ເປັນ ຄວາມ ຜິດ ຮ້າຍ ແຮງ, ຂໍ້ມູນການປຸກຂໍ້ມູນຈະຖືກສົ່ງໄປຫາ APP ໂທລະສັບມືຖືໂດຍຜ່ານເວທີຟັງໄດ້, ແລະໂມດູນການສື່ສານ GPRS-GA6 ຈະຖືກເປີດໃຊ້ເພື່ອສົ່ງຂໍ້ມູນປຸກຜ່ານຂໍ້ຄວາມທາງໂທລະສັບມືຖືແລະໂທຫາພະນັກງານທີ່ກ່ຽວຂ້ອງທີ່ກໍານົດໄວ້ກ່ອນ..





هل يمكنك تقديم شركة RFID IoT؟